Modeling the Map Sensor voltage output into a usable number. (From the Helm Manual:)
 y = mx + b
y = mx + 2.85v
y = (-.1)x + 2.85v
(-.1)x = y - 2.85
x = (y - 2.85v) / (-.1)
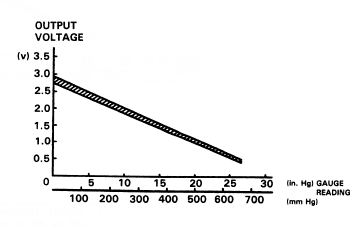
Alldata publishes a MAP sensor spec, and I took data from my MAP sensor to compare, and added the data per the Helm-based formula:
y = mx + b
y = mx + 2.85v
y = (-.1)x + 2.85v
(-.1)x = y - 2.85
x = (y - 2.85v) / (-.1)
Alldata publishes a MAP sensor spec, and I took data from my MAP sensor to compare, and added the data per the Helm-based formula:
05 in Hg| Alldata: 2.5 | 2.35 Helm-based formula | my actual: 2.460
10 in Hg| Alldata: 2.0 | 1.85 Helm-based formula | my actual: 1.938
15 in Hg| Alldata: 1.5 | 1.35 Helm-based formula | my actual: 1.509
20 in Hg| Alldata: 1.0 | 0.85 Helm-based formula | my actual: 1.012
25 in Hg| Alldata: 0.5 | 0.35 Helm-based formula | my actual: 0.558
Based on the Alldata spec, the formula is:
x = (y - 3.0v)/(-.1)
It looks like these two formulas can give you a reasonable range for calibration. -- markolson - 04 Mar 2005
|
Copyright © 2002-present by the contributing authors. All material on this collaboration platform is the property of the
contributing authors, and is covered by the Non-Commercial Share-Alike License unless explicitly stated otherwise. |
|